Portfolio
Some of these projects are in my Git Hub Repository, press the icon at the bottom of the page
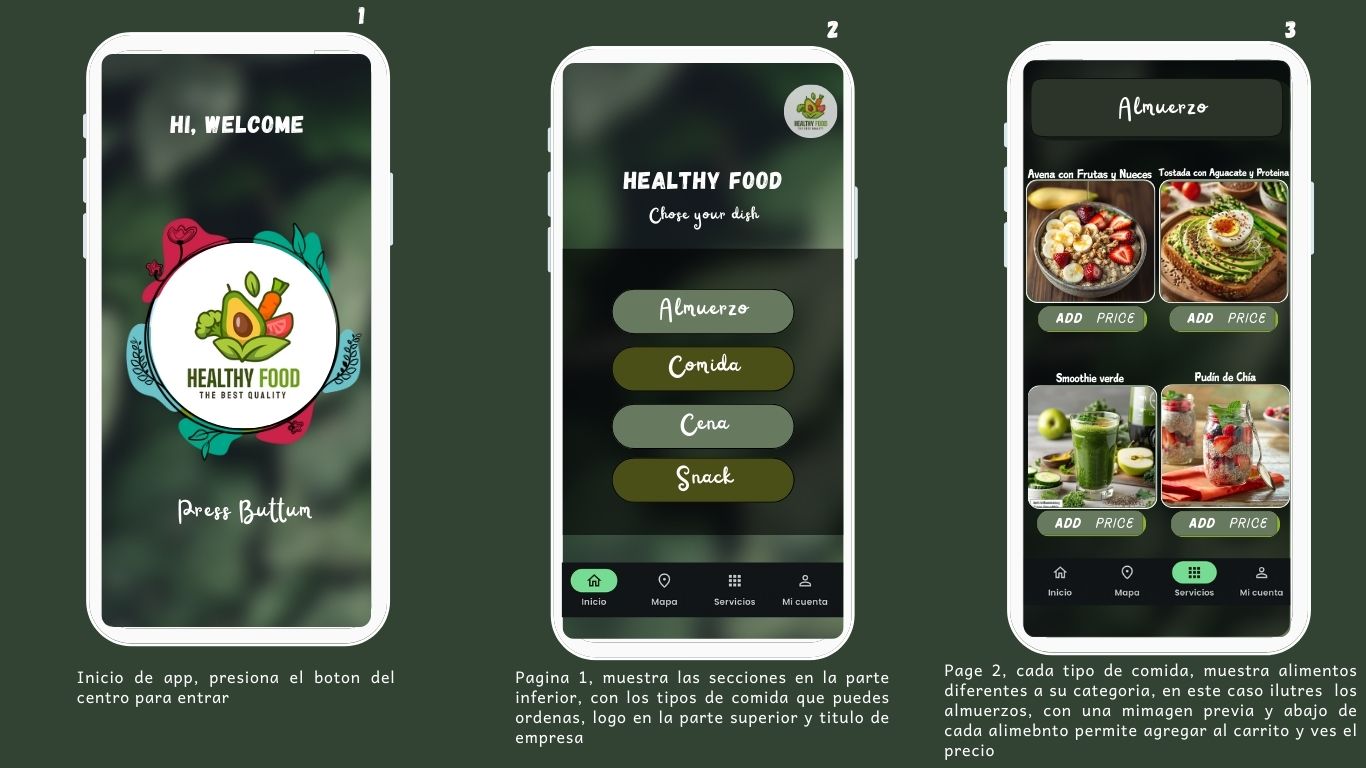
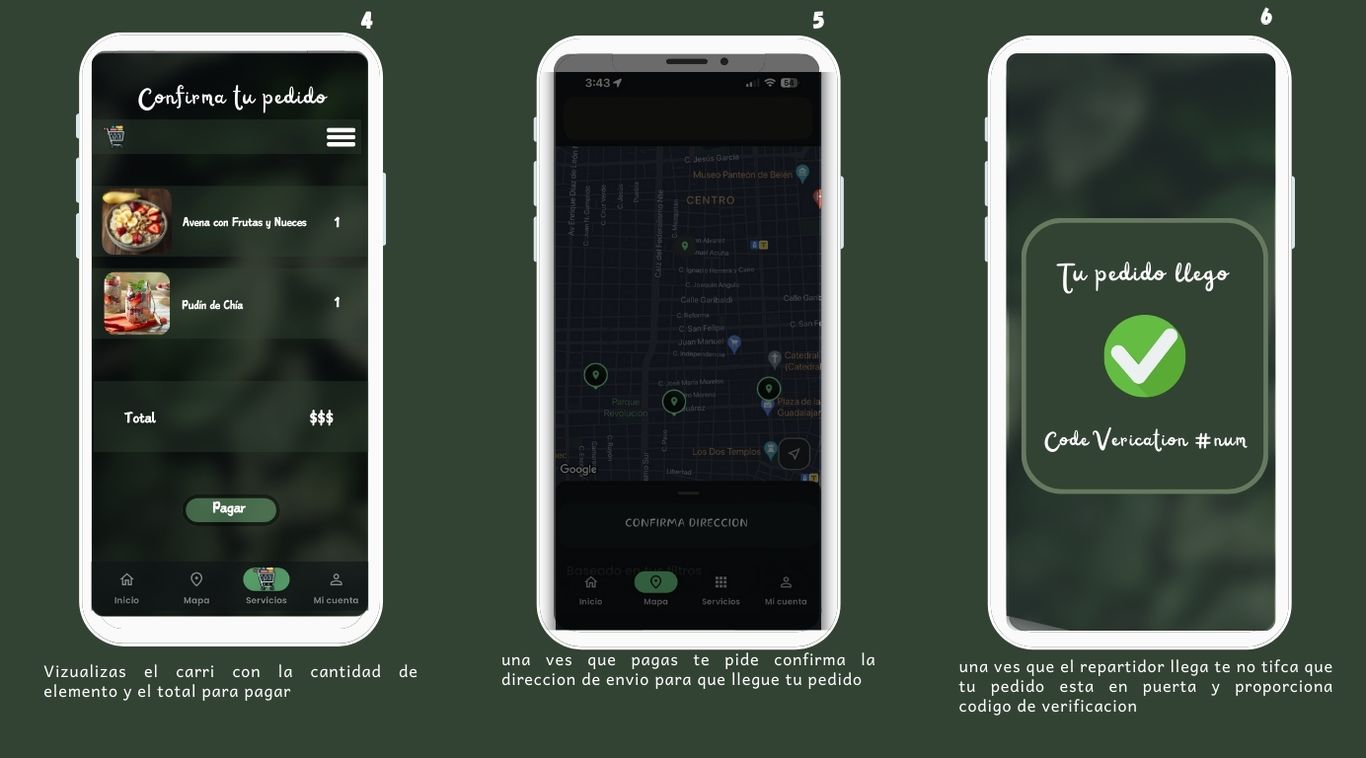
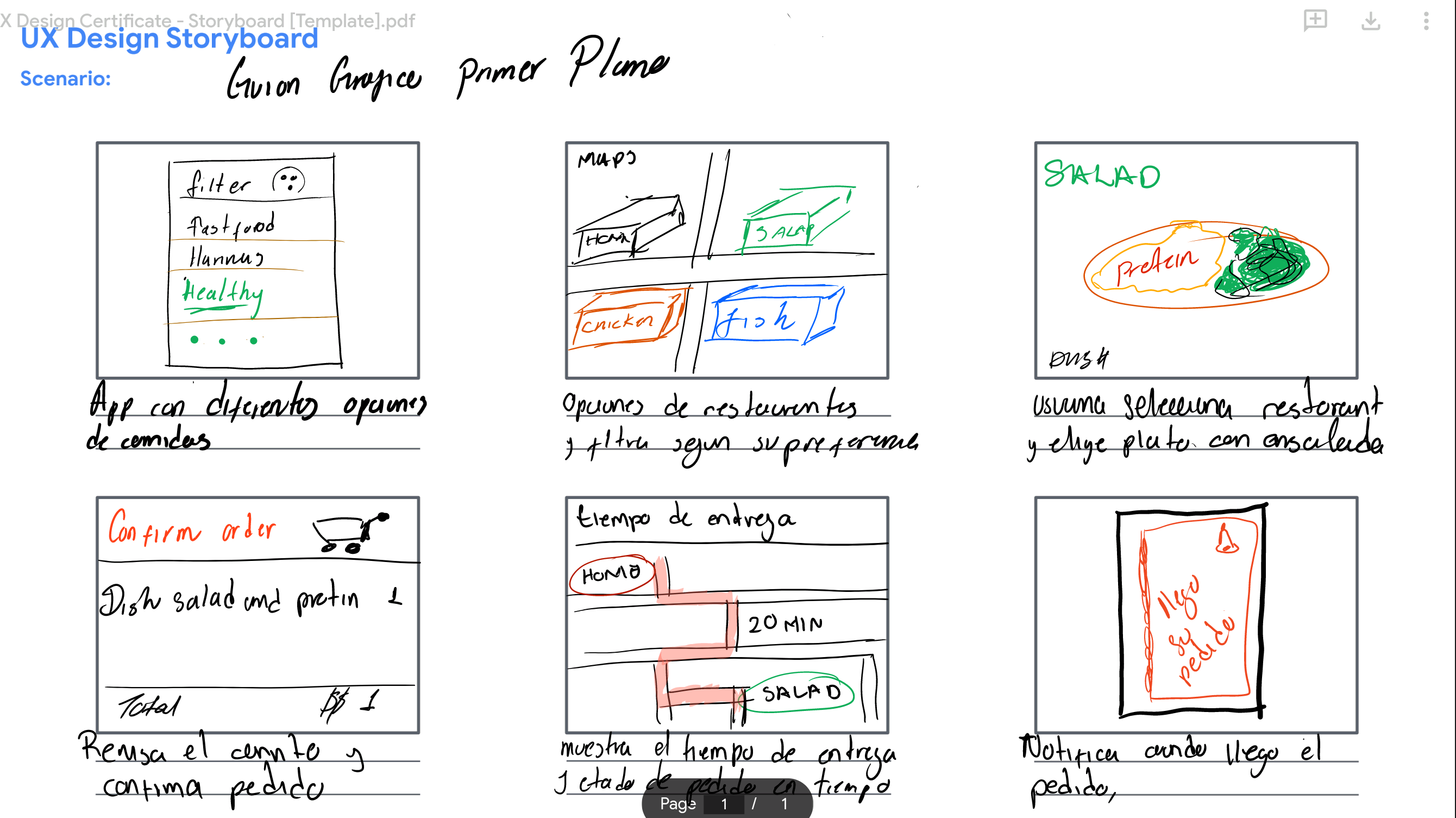
Healthy Food App, implementing the UX User Experience phases
Design of a mobile app focused on promoting healthy eating habits, allowing users to access recipes, create personalized meal plans, and generate shopping lists.
My Role: UX Designer: Responsible for user research, low and high fidelity prototyping, and usability testing.
Technologies and Tools:
Figma: Design of high fidelity interactive prototypes.
Link to interact
with figma and visualize the behavior:.
Diagramming Tools: Jamboard and Miro to create affinity diagrams and organize ideas.
Google Forms/Sheets: Collection and analysis of user data.
Key Results:
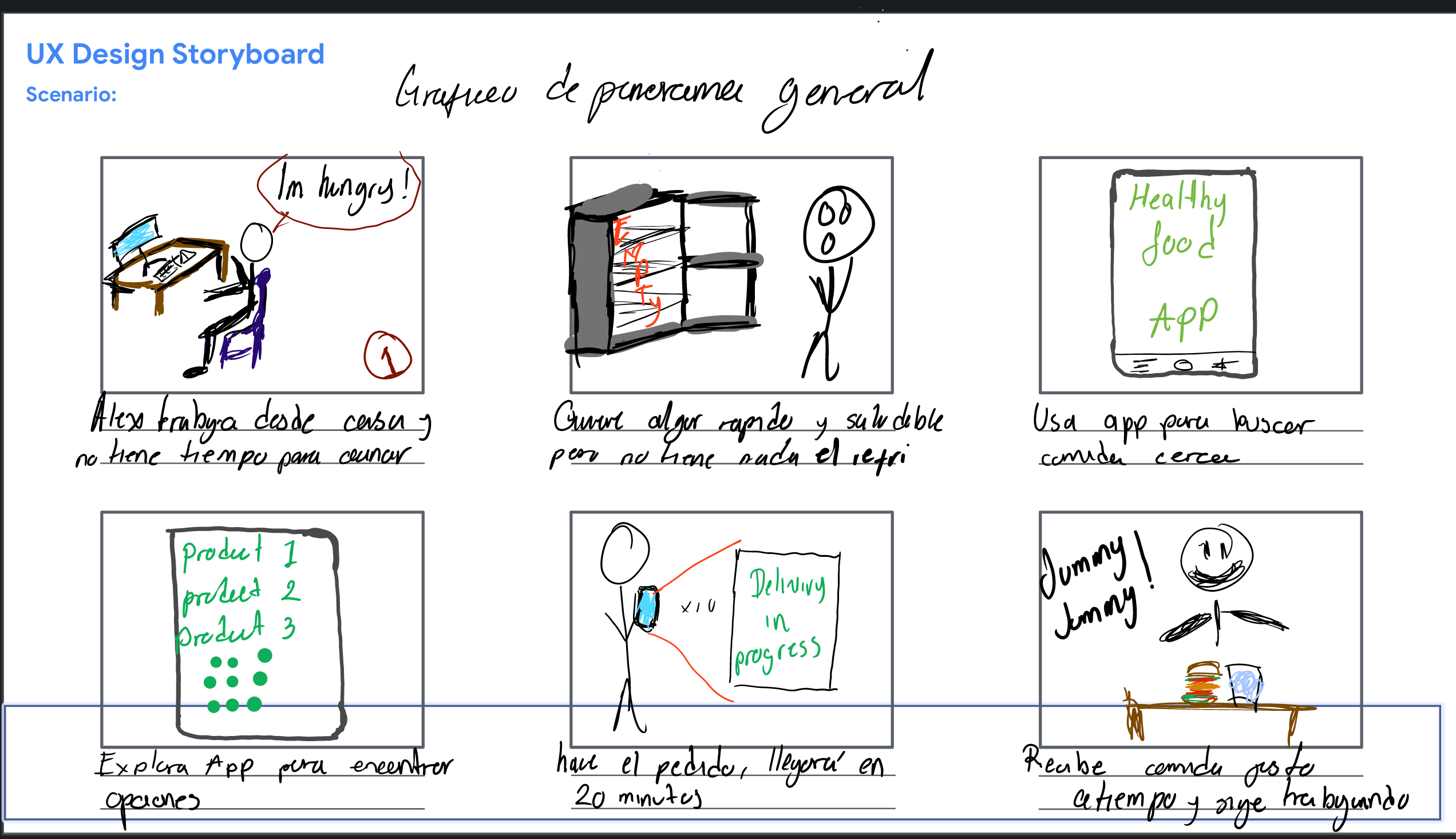
Creation of an intuitive interface based on real user data.
Functional prototype with optimized navigation and positive feedback in usability tests.
Increased empathy towards users by designing solutions based on their real needs.
Skills Developed:
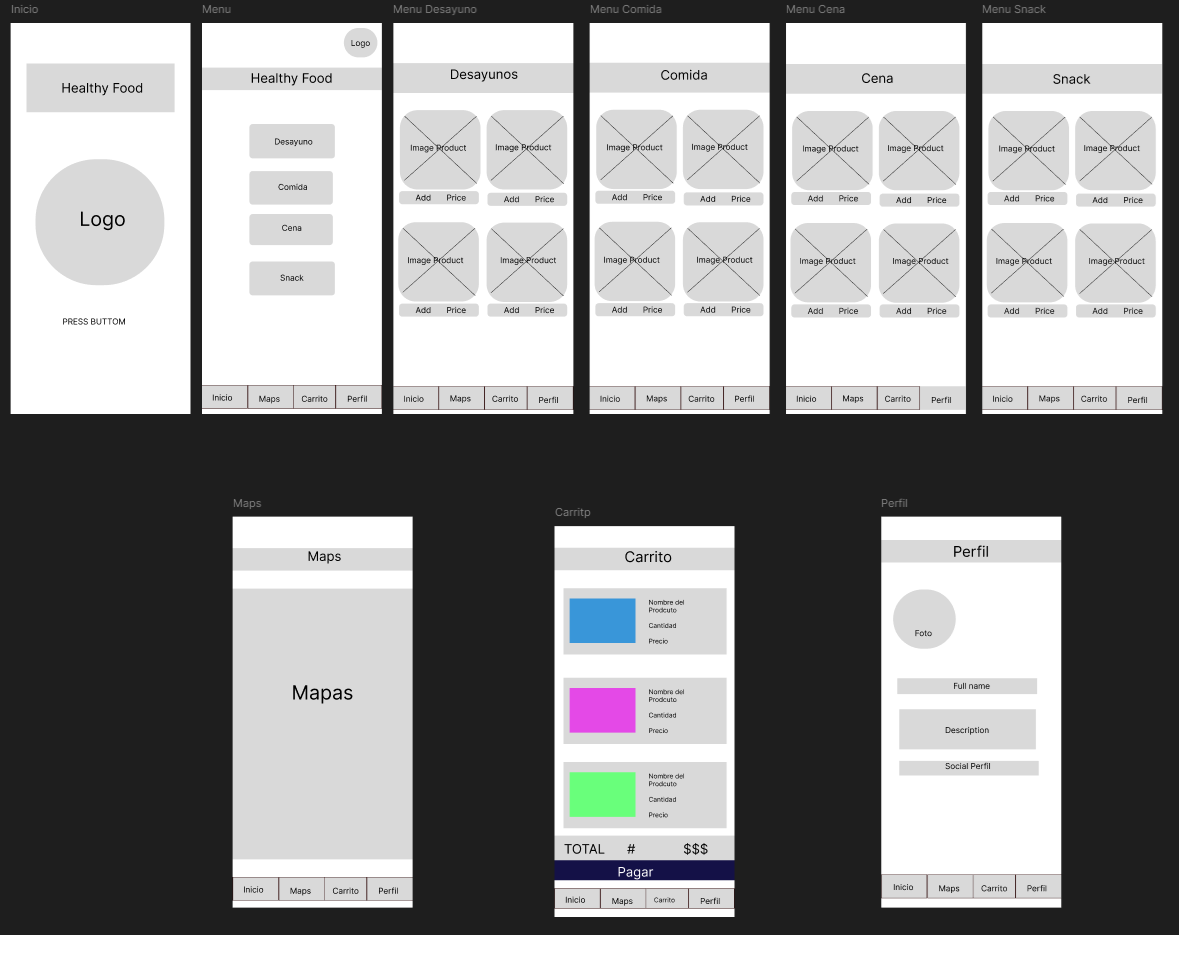
User research and data synthesis.
Creation of user flows, page wireframes, and interactive prototypes.
Effective communication of findings and design to stakeholders.
Development of DCU Door Control Module CTEP 2023
CTEP (Continental Talent Entry Program):
Development of DCU applying V-Cycle, ASPICE, Software Development Life Cycle, using Scrum and Kanban frameworks.
Classified functional and non-functional requirements using IBM DOORS.
Developed and modeled the requirements architecture in IBM Rhapsody.
Designed and developed software architecture using Autosar Builder and EB Tresos.
Created test cases for unit testing, integration testing, and system testing using IBM DOORS.
Git and GitHub for version control and collaboration.


Development of Cuida+ App, implementing Agile methodology "Scrum Framework"
Applying best practices in project management considering the Iron Triangle (Time, Cost and Scope).
Functional and Non-Functional Requirements Analysis.
Assignment of roles and responsibilities with the Kanban board.
Project Development under Agile methodologies implemented Scrum Framework with 3 Roles (Product Owner, Scrum Master, Developers)
and 5 Events (Sprint, Daily Schedule, Sprint Planning, Sprint Review and Sprint Retrospective, ) and 3 Artifacts (Product Backlog, Sprint Backlog, Product Increment, )
Fashion Cat Ecommerce Development Implemented Front End and BackEnd and UX
Fashion Cat Ecommerce Development Implemented Front End and BackEnd and UX
Technologies Used:
HTML & CSS/SASS: For a solid structure and custom styles that highlight the essence of the store.
Node.js: Efficient management of the backend and services.
Bootstrap: Fast and elegant components to improve the appearance and accessibility of the site.
JavaScript: For dynamic and interactive functionalities that enrich the user experience.
UX: Responsive Design Low and high fidelity diagrams using Figma

Click on the image to go to the e-commerce link
Design and Simulation of an omnidirectional robot in the Webots environment
The following work shows the process carried out to simulate a 4-wheeled omnidirectional robot Mecanum in the Webots environment. At this point the robot Astérix is not able to follow a control path, however, this does not mean that the working paradigm is wrong, but that deep knowledge about a simulation environment is really important. We compare 2 paradigms of implementing movement and control relationships, and we analyze the results of each one of them. Finally, to check that the path control is completely functional, it is applied to the example model youBot from the company KUKA available in the Webots documentation.
.png)
Research and development documented in PDF
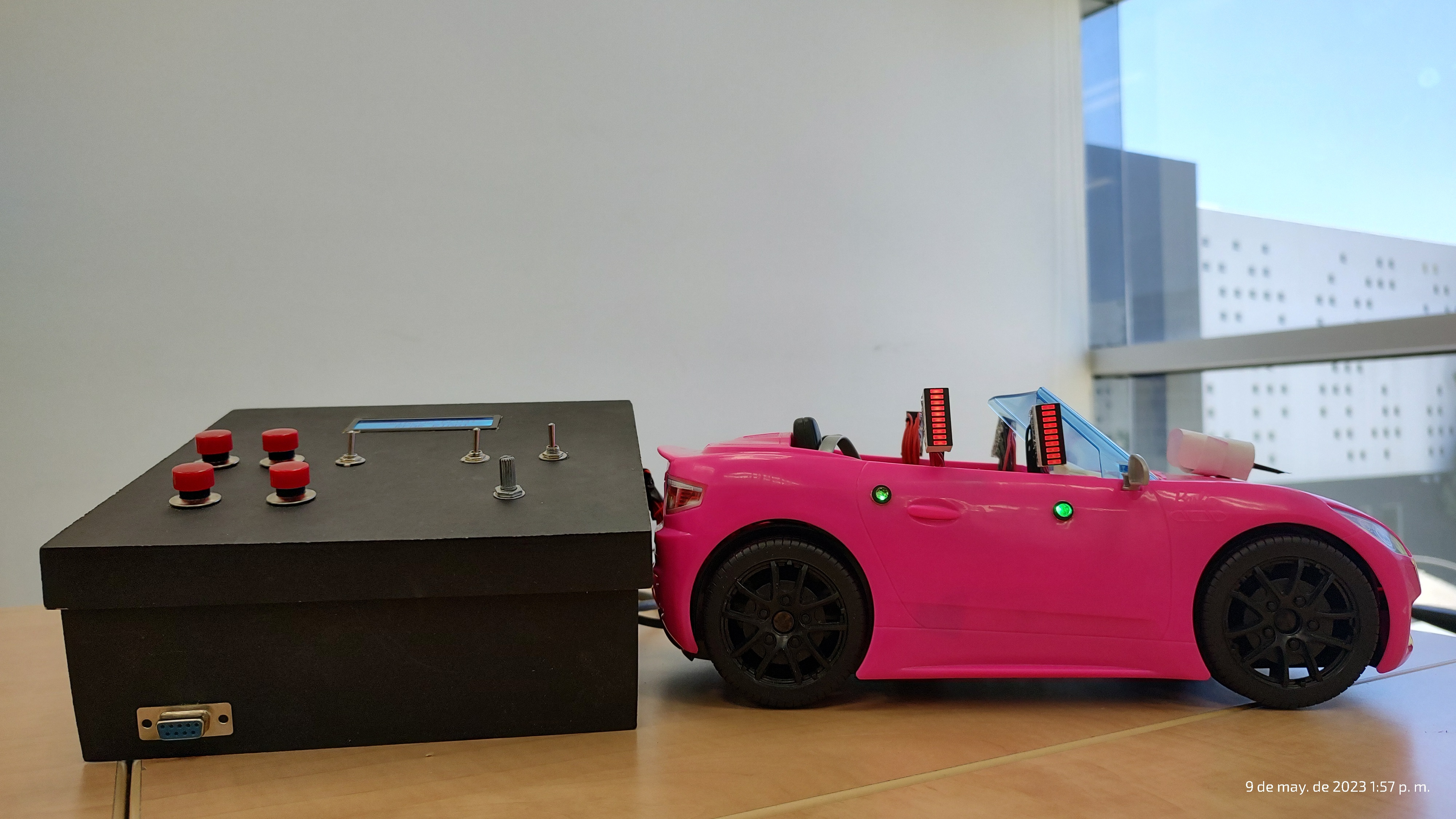
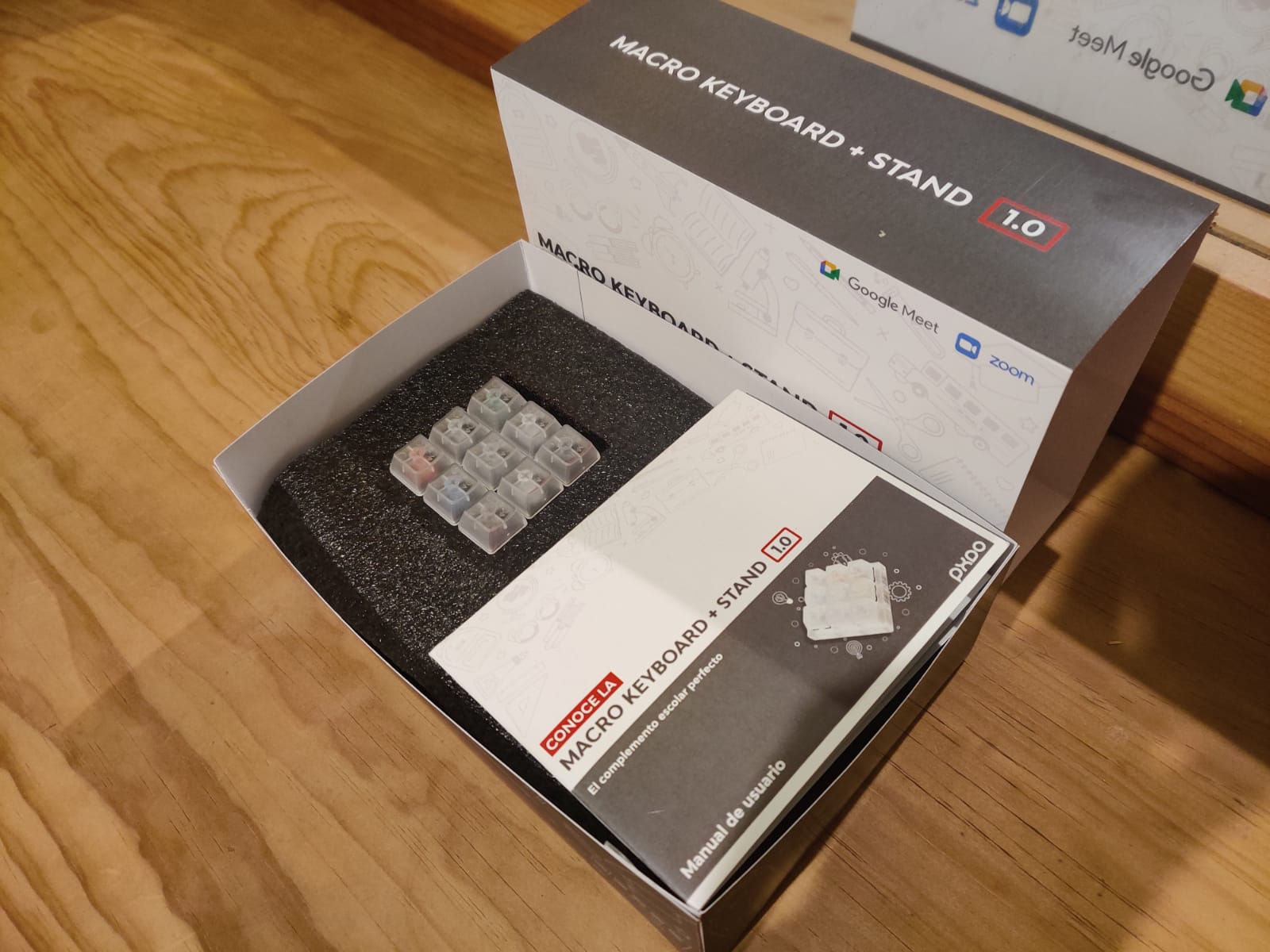
Keyboard with macros, developed on Raspberry Pi Pico and Python
Online classes play an important role
today in the face of the pandemic caused by the SARS Covid-19 virus,
due to this, video conferencing platforms (Google Meet and Zoom Meetings) have been used,
which aim to be an alternative to avoid educational lag.
Although the interface of the platforms is designed so that
classes are as fluid as possible, a device was designed
that allows agility in day-to-day classes, allowing
the user to activate platform functions with a single key.

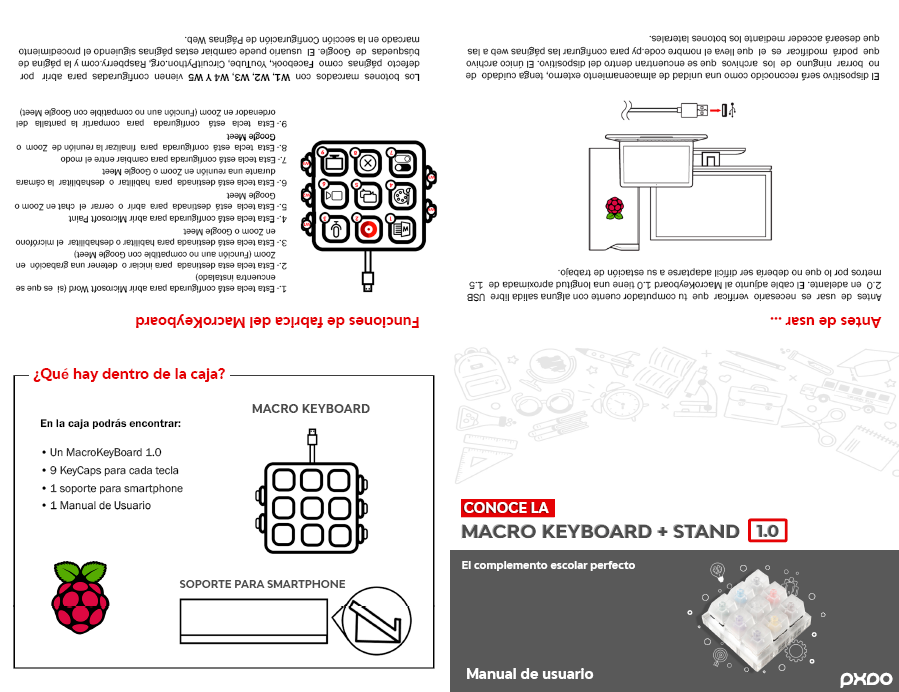
Research and development documented in PDF
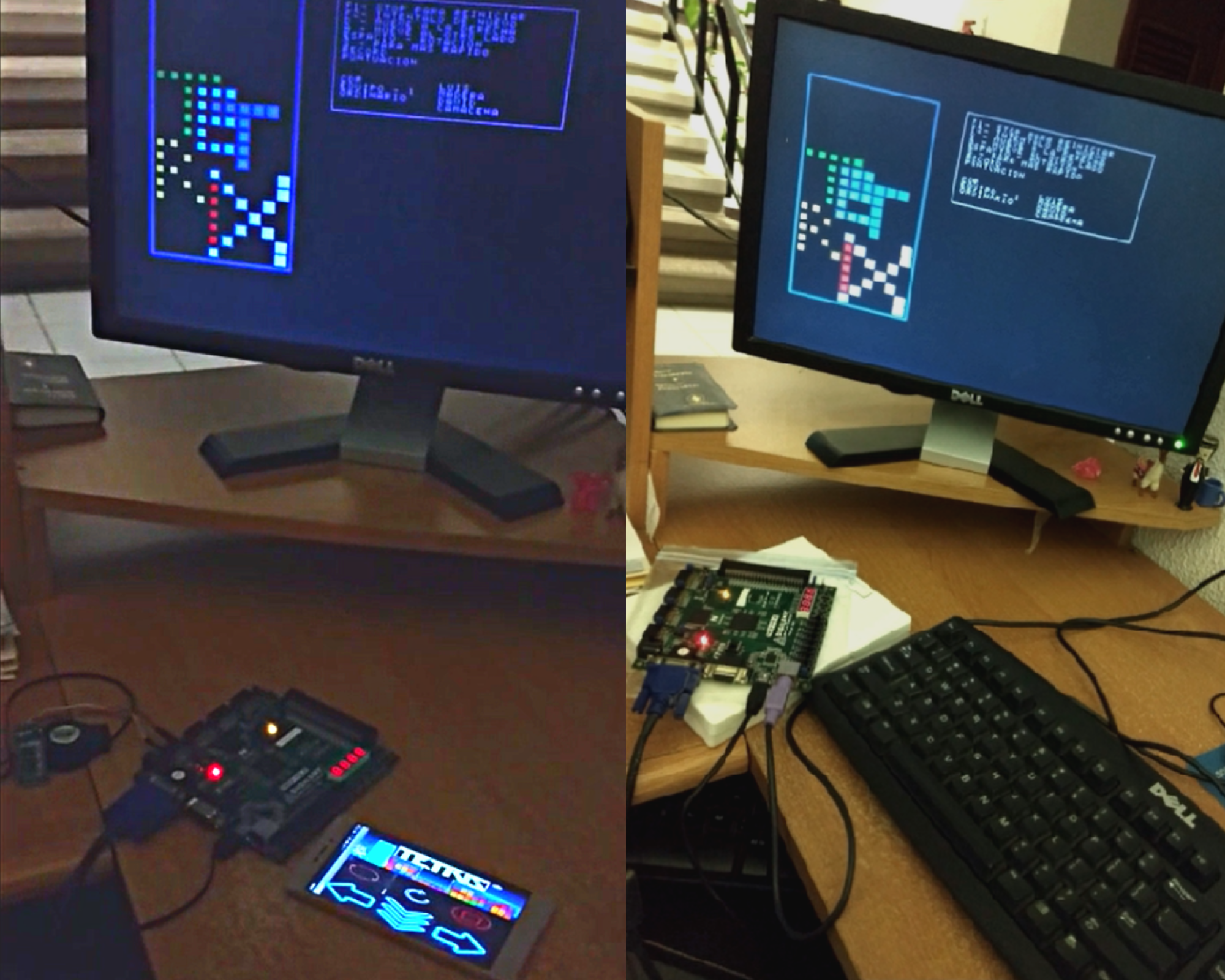
Development of a textrix video game on FPGA, with VGA modules controlled by a PS2 keyboard port and via Bluetooth
Main Features of the Project:
VGA Graphics and Text: VGA Graphics: Implementation of colorful and detailed graphics representing the Tetris game on a VGA screen, with a design optimized for clarity and performance.
VGA Text: Use of on-screen text to display scores, levels, and messages in real time, with clear and stylized fonts.
PS/2 Module: Integration of a keyboard using the PS/2 protocol to control the game pieces accurately and quickly.
Bluetooth Interface: Development of a Bluetooth connection that allows interaction between the FPGA and a mobile device.
Two-way communication that allows sending and receiving commands in real time.
App Inventor for Remote Control: Create a custom app in App Inventor that acts as a remote control for the game.
The app includes an intuitive interface to move, rotate, and manage game pieces, improving the user experience
Documented research in PDF
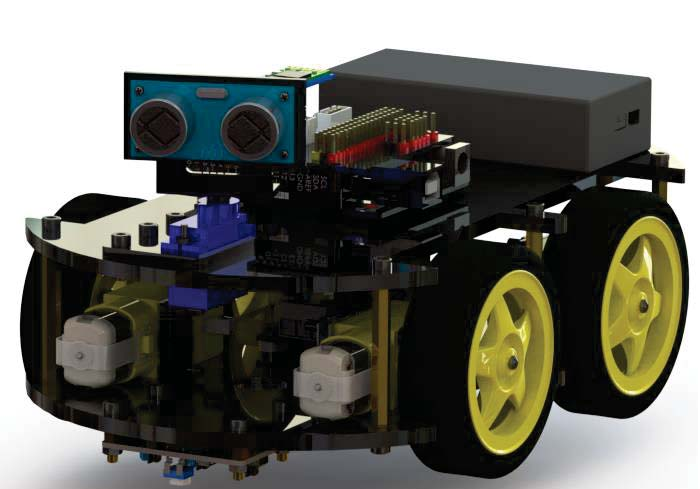
Prototype of a Scaled Autonomous Differential Robot with Fuzzy Control, Operable via PC and Mobile Interfaces
Project Phases:
Requirements and Classification Phase:
Identification of the functional and non-functional requirements of the system.
Classification of necessary components: mechanical, electronic and software.
Control Simulations:
Differential Control: Implemented in MATLAB Simulink to adjust the behavior of the motors and ensure precise movements.
Fuzzy Control: Development of a model based on fuzzy logic in MATLAB Simulink to optimize autonomous and adaptive handling in various conditions.
Mechanical Design and Physical Simulation:
Modeling of the vehicle using SolidWorks, including the structure and mechanical systems.
Simulation of mechanical behavior and physics analysis to verify the stability and performance of the design.
Electronic Design:
Implementation of the necessary circuits in Proteus, with emphasis on the connection and control of motors and sensors.
Communication tests between the electronic modules and the main control system.
Control Interface Development:
Manual Control: Creation of an interface in MATLAB to simulate the steering and movement of the vehicle manually.
Bluetooth Control: Development of a custom app in App Inventor, which allows the vehicle to be controlled from a mobile device.
Click on the image to go to the Youtube link
Research documented in PDF
SCADA systems for level detection in 2 tanks using Discriminant and Kmeans algorithms
Research documented in PDF
For this practice we will implement the App Designer and Simulink tools, both from Matlab software. These tools will allow us to simulate the behavior of a SCADA system that aims to monitor the behavior of a system of two interconnected tanks designed previously. This system has an extended state observer. The signals are measured directly from the linearized model. This system will have 6 types of analysis. The first 3 refer to the use of the interface and the last 3 are oriented to the analysis of event detection based on clustering-Discriminant Function data modeling.